

News
SpaceX putting the finishing touches on Starship’s orbital launch pad
SpaceX appears to have begun tying up a number of loose ends at Starship’s first orbital launch site, potentially setting the stage for major rocket testing CEO Elon Musk has stated could begin next month.
The list of tasks started or completed in just the last week or two is significant and each one is singularly focused on similar goals: pave the way for SpaceX to finish testing the first orbital-class Starship and Super Heavy booster and prepare for the first orbital launch attempt of the largest rocket ever built. While SpaceX’s progress towards those goals over the last several months has been decidedly slow relative to the pace of similar work completed in the very recent past, the nominal timeline Musk recently sketched out suggests that things could once again start to happen at a dizzying rate.
Launch Tower
Kicking off a jam-packed two weeks of minor to major finishing touches, SpaceX rigged Starbase orbital launch tower’s rocket-catching arms to a system of pulleys, and ‘drawworks’ in a process known as “reeving.” Thousands of feet of rope were first threaded from up, down, and through the ~145m (~440 ft) tower to act as a temporary guide for the next step. Once fully rigged, anchored, and attached to the start of the steel cable actually meant to operate the system, the tower’s ‘drawworks’ was activated for the first time to reel in the guide rope – simultaneously installing the steel cable. By November 9th, the process was more or less complete, leaving the steel cable firmly attached to the tower’s giant rocket-catching arms and able to carry their significant weight.
Thanks Ralph and @StarshipGazer! Updated diagram below. pic.twitter.com/lUvcbshKGs— LunarCaveman (@LunarCaveman) November 10, 2021

SpaceX hasn’t quite finished installing those arms and does not appear to have picked up the slack in the cable that will eventually lift them up and down the tower, but the arm assembly’s first real move is likely just a few weeks away. Notably, a bit of scaffolding around the tower’s ‘legs’ still needs to be removed before the catch arms can freely roll up and down rails welded to their exteriors. SpaceX will also need to complete shakedown testing of the arms themselves, ensuring that the massive structures’ hydraulic, electrical, and mechanical systems are all working properly.
In the near future, those arms will be used to grab, lift, and install Super Heavy boosters and stack Starships on top of them, while SpaceX also hopes to eventually use them to catch boosters and ships out of mid-air. At least for the former role, a separate arm visible about halfway up the tower in the photo above will also be crucial. Known as the tower’s Starship quick-disconnect (QD) arm or claw, SpaceX has also made significant progress on the structure, practically completing it in the last few days.
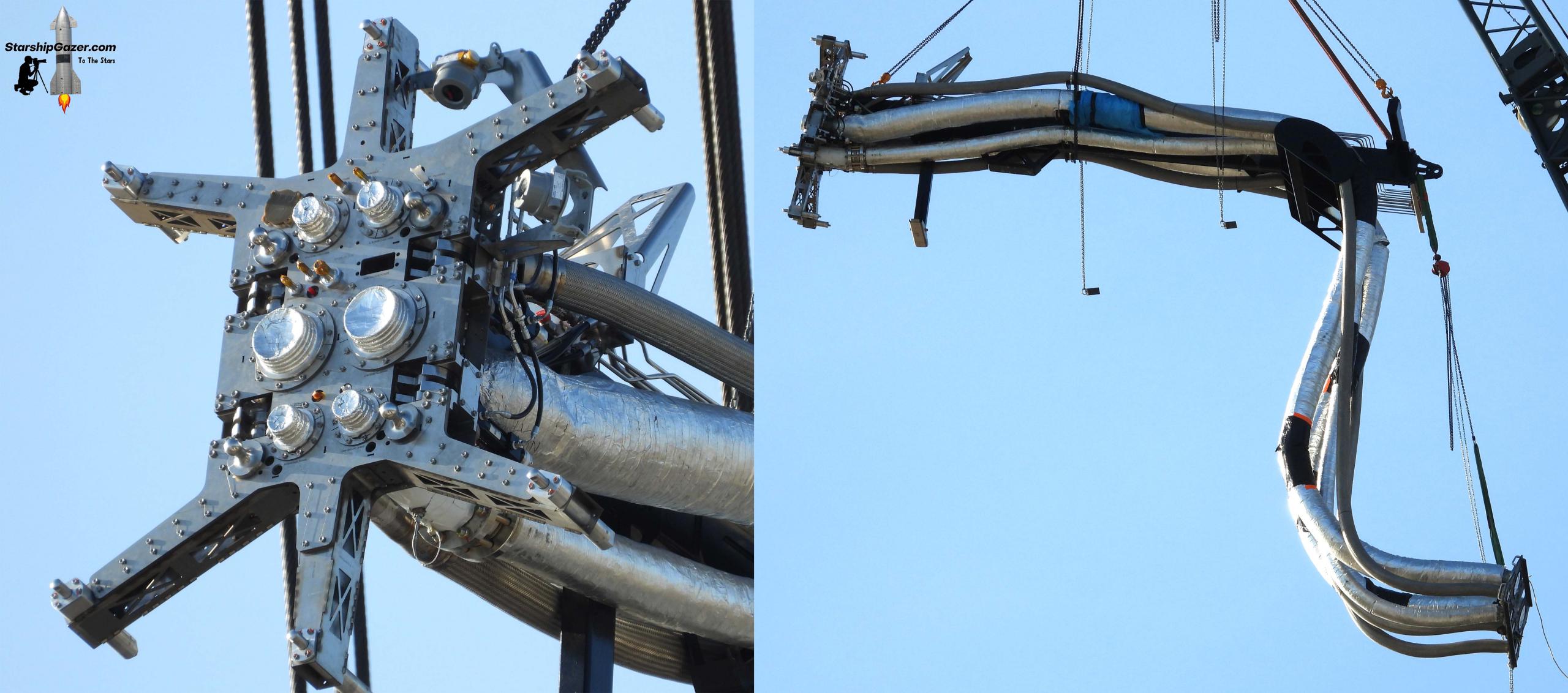


Designed to fuel Starship and stabilize the top of Super Heavy with its claw, the Starship ‘QD arm’ is also able to swing left and right both to quickly back away during launches and to make room for the catch arms during rocket catches and ship/booster stacking operations. Last week, SpaceX technicians finished plumbing the arm, which requires thousands of feet of insulated steel tubes to connect to the pad’s propellant tanks. This week, on November 23rd, SpaceX installed the last major component of the arm – the actual quick disconnect (QD) mechanism that will connect to Starship to supply power, communications, and propellant.
A few small actuators likely still need to be installed and the QD mechanism itself will have to be fully connected to pad systems but the QD arm now appears to be more or less complete and should soon be ready to fuel Starships installed on top of Super Heavy boosters.
Launch Mount
Last but not least, SpaceX performed multiple tests of the pad’s ‘orbital launch mount’ – the giant, steel structure that will support Super Heavy, hold the booster down during testing and before liftoff, and supply it with thousands of tons of propellant. On November 21st, SpaceX completed the first of those tests, seemingly venting an unknown gas out of the mount. More likely than not, it was the first simultaneous test of all 20 of the mounts Raptor Boost engine gas supplies, which – having no need to reignite in flight – will rely on ground gas supplies for ignition. Each of Super Heavy’s 20 outer Raptor engines has a small umbilical and quick disconnect mechanism, resulting in what is likely the most mechanically complex rocket launch mount ever built.
 -
-

On November 22nd, the orbital launch mount’s booster quick disconnect panel actuated for the first time, showing off the first glimpse of how it will move forward to connect to Super Heavy after a booster is installed on the mount. To prevent its sensitive components from being practically incinerated each launch, the mount’s QD panel will also need to rapidly move away from Super Heavy just before liftoff.
Aside from simply avoiding direct impingement from the several-thousand-degree plume created by 29-33 Raptor engines at full thrust, that movement will also tie into some kind of hood, seamlessly actuating hatches that will close to truly protect the device. That hood was itself spotted for the first time on November 21st and will likely be installed on the launch mount and over the naked QD mechanism in the very near future.
Finally, over the last week or so, SpaceX has begun installing a number of new pipes on and around the launch mount, likely assembling a water deluge system that will help manage the extreme thermal and acoustic environment created by the most powerful rocket in history shortly before and after liftoff. When activated, a spray bar circling the mount’s full interior circumference will likely unleash several tons of water per second in a giant artificial waterfall, hopefully preventing Super Heavy from damaging itself with the sheer sound produced by its Raptor engines or violently eroding the surrounding pad or launch mount legs with its plume.
Ultimately, once all the tower, arm, and mount work described above is completed, the only obvious thing standing between the orbital launch pad and the first Super Heavy booster testing and first orbital Starship launch will be the delivery of liquid methane fuel, which could easily begin any day now.


Elon Musk told The Economist that artificial intelligence will likely surpass the combined intelligence of every human on Earth within about five years, and that humans may not remain in charge once that happens. In a wide-ranging interview with editor-in-chief Zanny Minton Beddoes, recorded at Giga Texas for the outlet’s Insider series, Musk compared the widening gap between AI and human intelligence to the gap between humans and chimpanzees.
“It’s hard to imagine that the chimpanzee would be in charge,” he said, addressing what happens to human authority once AI moves far beyond us.
Elon Musk reiterates his most optimistic prediction yet with “UHI” forecast
Musk’s timeline stretches out from there. Five years for AI to out-think humanity combined, ten years before humans lose meaningful control, and by 2036, he says, money itself may stop mattering.
Musk notes that if robots and AI produce more goods and services than people could ever consume, currency loses its purpose. He told Beddoes that governments could respond with direct payments, what he called “universal high income,” a term he first used in an X post last August describing a future where “everyone will have the best medical care, food, home, transport and everything else.”
There will be universal high income (not merely basic income).
Everyone will have the best medical care, food, home, transport and everything else.
Sustainable abundance.
— Elon Musk (@elonmusk) August 24, 2025
He also floated a more surprising prediction that deflation, and not inflation, would become the bigger economic problem, since expanding the supply of goods and services faster than the money supply grows would push prices down rather than up.
None of this is new territory for Musk, who has spent years describing an “age of abundance” built on Optimus and autonomous vehicles. What’s notable is the timing. The interview landed the same week Tesla shares dropped roughly 19 percent following a second quarter earnings report that beat on revenue but missed badly on profit, and as SpaceX stock continues to slide from its post-IPO peak.
Musk’s own net worth has fallen close to $700 billion since mid-June, according to the Bloomberg Billionaires Index, even as he describes a future where personal wealth stops being the point.
Musk did not dodge the risk side of the equation either. He put the odds of AI contributing to human extinction somewhere in the 10 to 20 percent range, then arrived at what he called his “philosophical conclusion” since the technology cannot realistically be stopped and the arguably better response is to keep building it and hope the outcome leans toward abundance rather than catastrophe. “I’ve gone from exhilaration to terror regarding AI,” he told Beddoes, “even intraday.”
Tesla is adding a new “Traction Control Modes” feature to its cars for better handling in any conditions. These features will roll out to the Model 3 and Model Y, the two vehicles in Tesla’s lineup that typically do not have drive modes for various conditions.
Tesla did include this in the Model S and Model X, as well as the Cybertruck.
The new feature will roll out with the 2026 Summer Update, which Tesla announced last week and subsequently started rolling out to some owners today. The Summer Update is the latest iteration of the usual four seasonal releases the company rolls out throughout the year. These releases typically feature some owner-requested features, as well as improvements to things like the Full Self-Driving suite.
Tesla reveals 2026 Summer Update with crazy fixes to Nav and more
This release is no different. Among the changes are improvements to Navigation, new customization options with wraps and how they can be shared and stored, more functionality with the Tesla smartphone app, and new gamification with self-driving.
However, Tesla announced today that it was adding another feature to the Summer Update. Traction Control Modes will now be available with the release
Tesla describes them:
“Choose from three updated Traction Control Modes: Auto for normal driving conditions, Slippery Surface for icy or wet roads, Stuck Assist when stuck in snow, mud, or sand. The mode resets to Auto at the start of each drive. To select, go to Controls > Dynamics > Traction Control Mode.”
Tesla’s 2026 Summer Update also includes new Traction Control Modes
📸: @PatchesHQ https://t.co/N9cD2lGP14 pic.twitter.com/ogLC5ROIgc
— TESLARATI (@Teslarati) July 26, 2026
The use of these modes will help improve a Tesla’s overall performance in less-than-ideal conditions. Typically, these traction control modes monitor wheel speed through sensors and track engine power to adjust responsiveness in various conditions.
These drive modes are not an ultimate solution to all driving conditions; just because there is a “Stuck Assist,” doesn’t mean your Tesla will dig itself out of a foot-and-a-half trench during a blizzard. It is important to remember that some of these scenarios also require some assistance from the driver. For example, driving in sand requires tires to be aired down significantly to increase traction and control.
However, this will be a welcome addition for those who use the Full Self-Driving suite and might not be convinced of its performance in adverse conditions. Some of us prefer to be in control in rain, snow, or ice, which is totally understandable. However, adjusting the Traction Control Mode while utilizing FSD in snow, rain, or ice could increase confidence and overall experience.
Tesla’s Summer Update is already rolling out to some owners, so it should be making its way to most of the fleet over the next several weeks. The Spring Update rolled out at a very conservative pace, so if you don’t have it by the end of August, don’t be too upset. It might just be Tesla’s method.

Just hours after Starship Flight 13 achieved a successful soft splashdown of its upper stage in the Indian Ocean on July 24, Elon Musk announced an ambitious next step for the company’s next launch of the rocket.
“Unless we discover problems after mission data review, SpaceX will attempt to catch the ship with the tower on [the] next flight,” the SpaceX CEO posted on X on Friday.
That “next flight” is expected to be Flight 14. The plan involves returning the Starship upper stage, commonly called the “ship,” to the Starbase launch tower in Texas and catching it mid-air using the same mechanical “chopsticks” arms that have already proven themselves with the Super Heavy booster.
Unless we discover problems after mission data review, SpaceX will attempt to catch the ship with the tower on next flight
— Elon Musk (@elonmusk) July 25, 2026
A successful catch would mark the first time an orbital-class upper stage has been recovered this way, advancing SpaceX’s goal of full and rapid reusability for the entire vehicle.
SpaceX has already demonstrated the tower-catch technique multiple times with Super Heavy. The first successful catch came on Flight 5 in October 2024, when Booster 12 was plucked from the sky by the Mechazilla arms. Subsequent flights, including those involving Boosters 14 and 15, repeated the feat. Several of those recovered boosters were later inspected, refurbished, and flown again, proving the system’s viability for quick turnaround.
Traditional reusable rockets, such as SpaceX’s own Falcon 9 or Blue Origin’s New Shepard, land on legs either on land or droneships. Rocket Lab has recovered its small Electron first stages by helicopter, but those are far lighter vehicles.
SpaceX Starship just nailed something it’s never done before
The China Academy of Launch Vehicle Technology (CALT), a subsidiary of the China Aerospace Science and Technology Corp. (CASC), completed a catch of its booster on July 10. They are the only entity besides SpaceX to attempt and complete the feat.
Flight 13 provided encouraging data. The ship executed a controlled reentry, flipped, and soft-landed intact in the ocean after deploying Starlink satellites, offering the first clear post-splashdown views of an undamaged heat shield. The Super Heavy booster, meanwhile, experienced a harder splashdown in the Gulf of Mexico.
Musk has previously stressed that ship catches would only follow multiple successful soft ocean landings to minimize risk of debris over land.
If Flight 14 succeeds, SpaceX would take a major stride toward routine, rapid reuse of both stages—critical for lowering launch costs and supporting ambitious plans for lunar and Mars missions. For now, teams are reviewing the Flight 13 data. Should everything check out, the next Starship flight could deliver one of the most spectacular recoveries in aerospace history.

Elon Musk explains what happens when AI outsmarts all of us
Tesla adds new ‘Traction Control Modes’ for better handling in any conditions





